北京博创尚和科技有限公司
智行W2A用户手册

智行W2A桌面级智能机器人教学套件
北京博创尚和科技有限公司
¶ 一.产品概述
智行W2A桌面级机器人平台是一款面向于支撑机器人工程专业、自动化类专业、电子信息类专业、机械类专业、计算机类专业等工科专业的与智能机器人技术相关的专业基础课程、专业核心课程、专业选修课程实验、以智能机器人为载体的综合实践和创新竞赛的平台。“智行W2A”以两轮差分底盘+五轴机械臂作为机器人组织结构形式,使用全栈自研的感知模块、控制模块、驱动模块、计算模块、通讯模块等,搭载丰富的导航定位/人工智能算法,满足工科相关专业的专业核心课程的实验教学需求。提供了完善的配套资料与课程体系,具有上手简单、全面开源、扩展性强、资源丰富、课程内容软硬结合、覆盖实验教学广泛的优点。
¶ 1.1产品外观
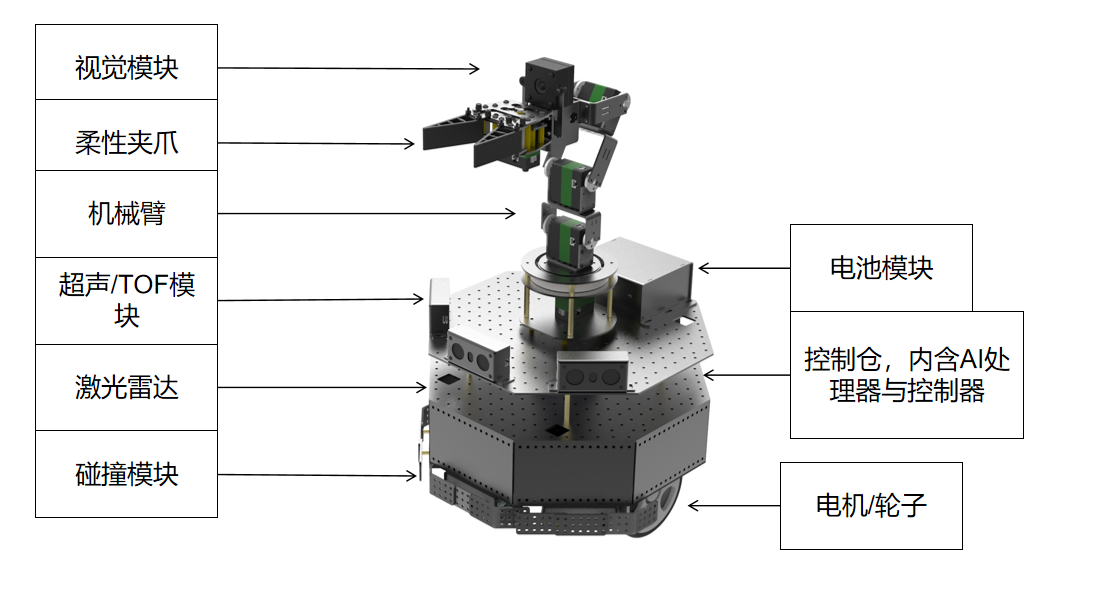
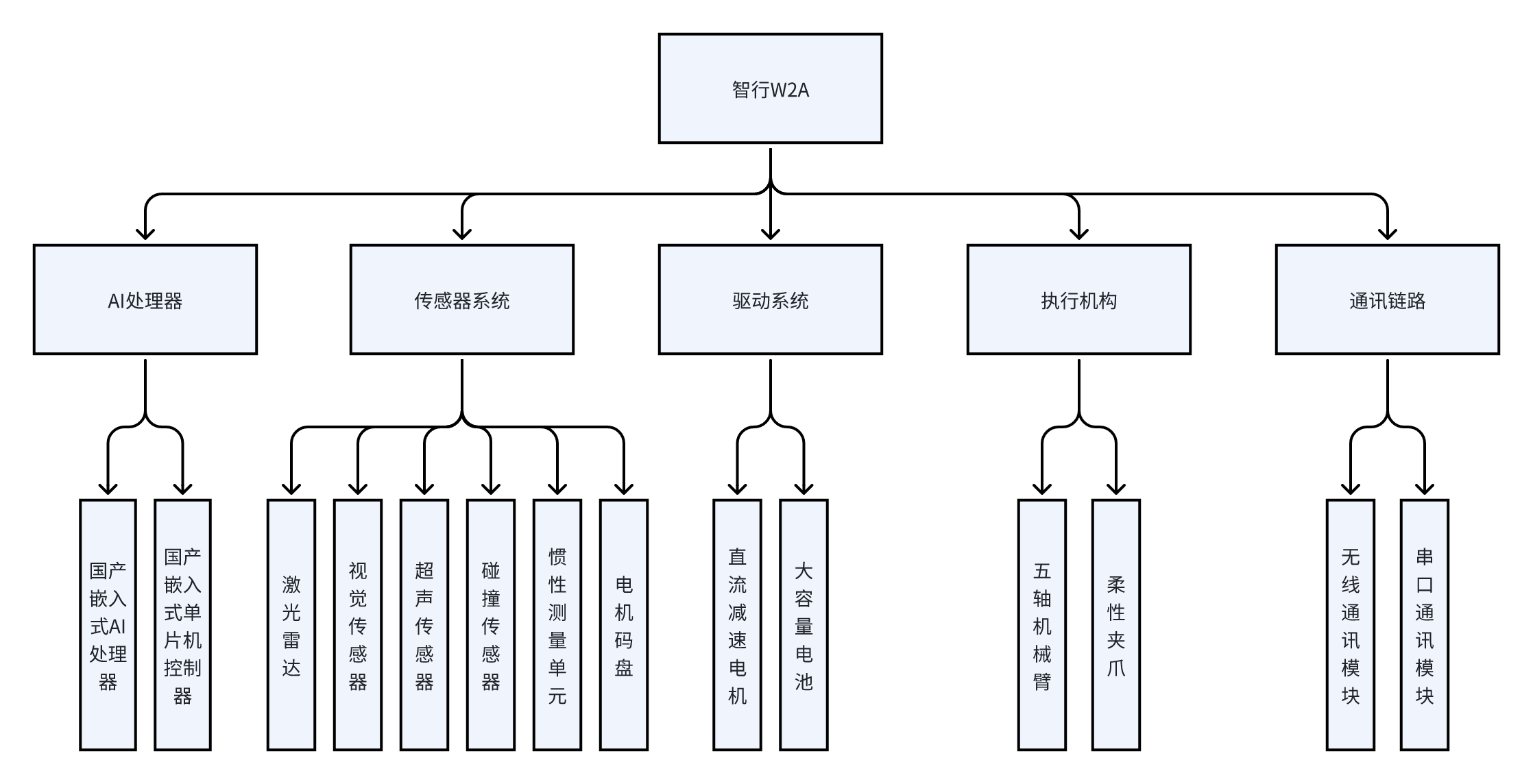
智行W2A硬件模块架构图
¶ 1.2产品特点
面向专业课程,智行W2A专注于ROS系统相关的智能化软件开发教学,硬件高度集成,无需重复造轮子,在软件层面,处理器内搭载ROS机器人操作系统与各种传感器驱动软件,数据处理算法,定位导航算法,人工智能算法等,并配有ROS/Python的调用接口。涵盖了教学课程大纲中的大量课程,并提供完善的课程实验指导书,PPT和视频。
面向综合实践,智行W2A聚焦在移动机器人视觉抓取搬运/桌面清洁场景,提供完善的场地描述与实践教学课程,智行W2A的综合实践课程以学科竞赛作为出口,帮助同学们通过学科竞赛来获得成就感,培养科研能力与创新精神,提供完善的综合实践课程指导书,教学用PPT和试讲视频。
面向创新创客,智行W2A结构上预留了大量的标准接口,可以使用各种设备设计加工新的结构件,实现结构的自由扩展;内部预置AI算法和应用软件全部开源,提供ROS和Python的调用接口与二次开发指南,方便快速调用或进行二次开发,提供详细的二次开发手册。
总而言之,智行W2A教学内容设计深度贴合行业工程师技能体系,通过基于该平台的渐进式学习和实践,学生毕业后能更迅速地适应机器人与人工智能相关岗位的需求,对于继续深造和就业可提升持续竞争力。
¶ 1.3适用领域
智行W2A主要面向以下客户群体:
机器人工程、自动化类专业、电子信息类专业、机械类专业、计算机类专业开设智能机器人技术相关的专业基础/核心/选修课程;
机器人工程、自动化类专业、电子信息类专业、机械类专业、计算机类专业开设以智能机器人应用开发为载体的综合实践课程;
工科专业参加智能机器人主题的(如中国机器人大赛,中国高校智能机器人创意大赛等)创新竞赛;
相关工科专业开展智能机器人技术相关的科研创新项目,双创项目,开展毕业设计等;
¶ 二、产品组成
智行W2A由硬件系统,软件系统与教学资源三部分组成。
¶ 2.1硬件系统
智行W2A硬件部分由AI处理器、传感器系统,运动系统、执行单元、通信系统五部分组成。使用航空防撞箱进行收纳。
各模块主要规格参数如下所示:
| 主要部件 | 数量 | 外观 | 主要规格参数 |
|---|---|---|---|
| AI核心处理器 | 1 |  |
国产AI处理器搭载了八核64位CPU,主频2.4GHz,能够为各类AI应用场景带来更优化的性能表现。集成了高性能的GPU和NPU。NPU高达6 TOPS算力的AI加速器,支持INT4/INT8/INT16混合运算,可以轻松转换基于TensorFlow / MXNet / PyTorch / Caffe等一系列框架的网络模型。此外,AI处理器支持多通道输入输出和多屏异显。 |
| 嵌入式控制器 | 1 |  |
嵌入式控制器采用国产嵌入式MCU,主频200MHz,配置丰富的传感器接口。配置机器人数字舵机接口,可直接驱动多个数字舵机。配置电机接口,可驱动多路电机。嵌入式控制器和电源板结合在一起,可以为多种外设供电。 |
| 电源 | 1 |  |
电池电压12.6V,电池容量10000mah,充电功率60W,智能化电源管理系统。 |
| 视觉传感器 | 1 | 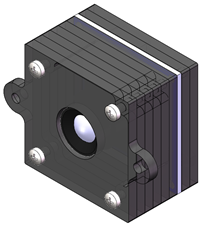 |
200万像素高清摄像头,USB免驱接口,彩色全局曝光,饱和度、曝光值、对比度等参数可调,最大帧率120FPS。 |
| 激光雷达 | 1 |  |
高精度激光雷达,最大测量范围20米以上,支持强度信号,分辨率0.25度。 |
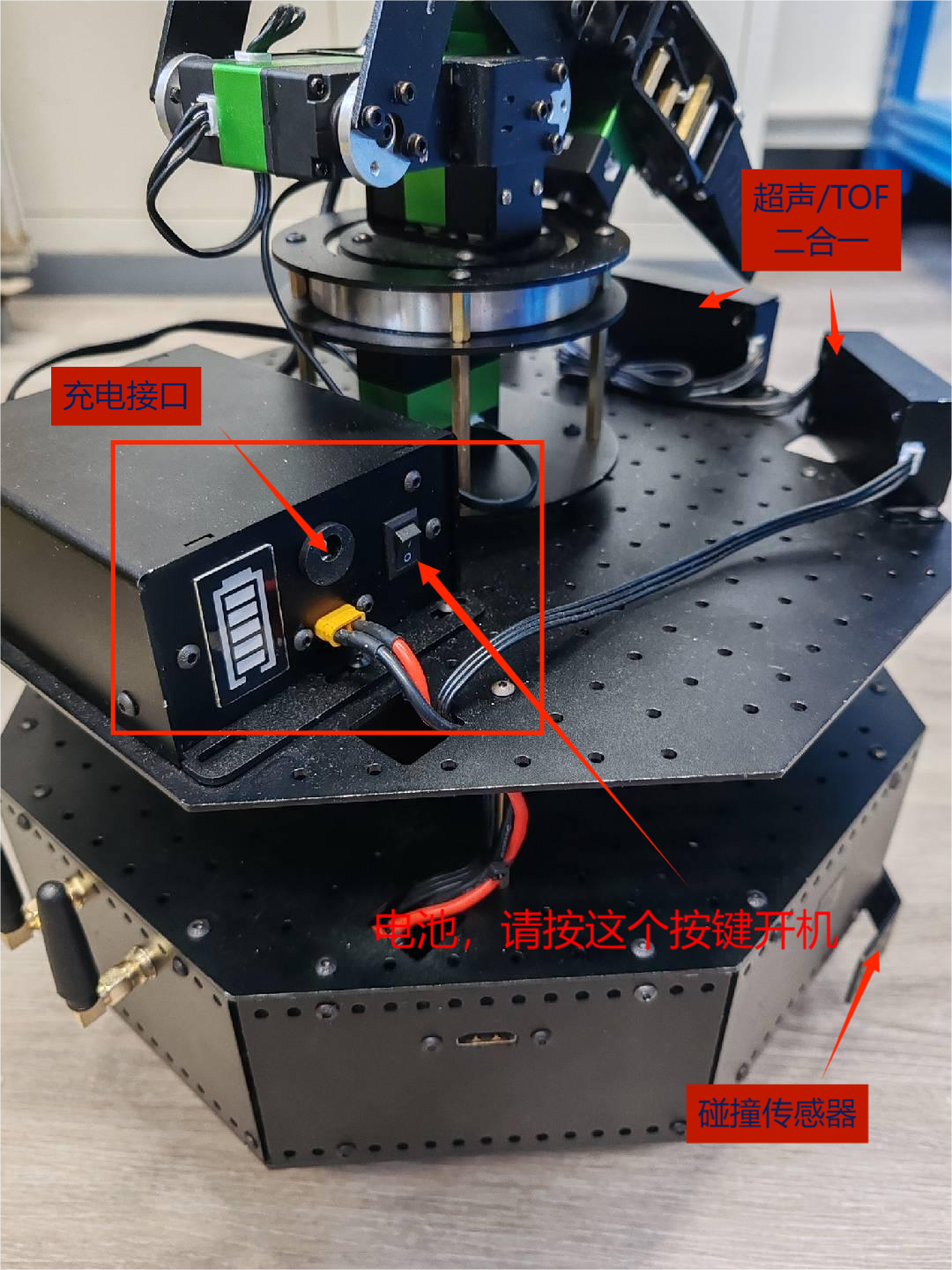
| 超声/TOF二合一传感器 | 3 |  |
自研超声/TOF二合一传感器,节省空间,可识别玻璃等透明物体; 超声测距范围40~4000mm; TOF传感器测距范围5~4000mm; 高光学串扰补偿; |
| 碰撞传感器 | 3 |  |
机械式碰撞传感器,高灵敏度,用于机器人避障。 |
| IMU模块 | 1 |  |
高精度惯性测量单元,输出三轴角速度,三轴线加速度,三轴姿态,数据输出频率200HZ,采用十七阶级联卡尔曼滤波算法 ,动态/静态精度优秀。 |
| 直流减速电机 | 2 | 12V直流减速电机输出,独立驱动,485总线通讯,抗干扰能力强,高精度光电编码器,准确输出位姿。 | |
| 五轴机械臂 | 1 |  |
五轴机械臂包含6个大扭矩舵机,支持ROS的moveit开发,包含柔性机械夹爪。 |
¶ 2.2软件系统
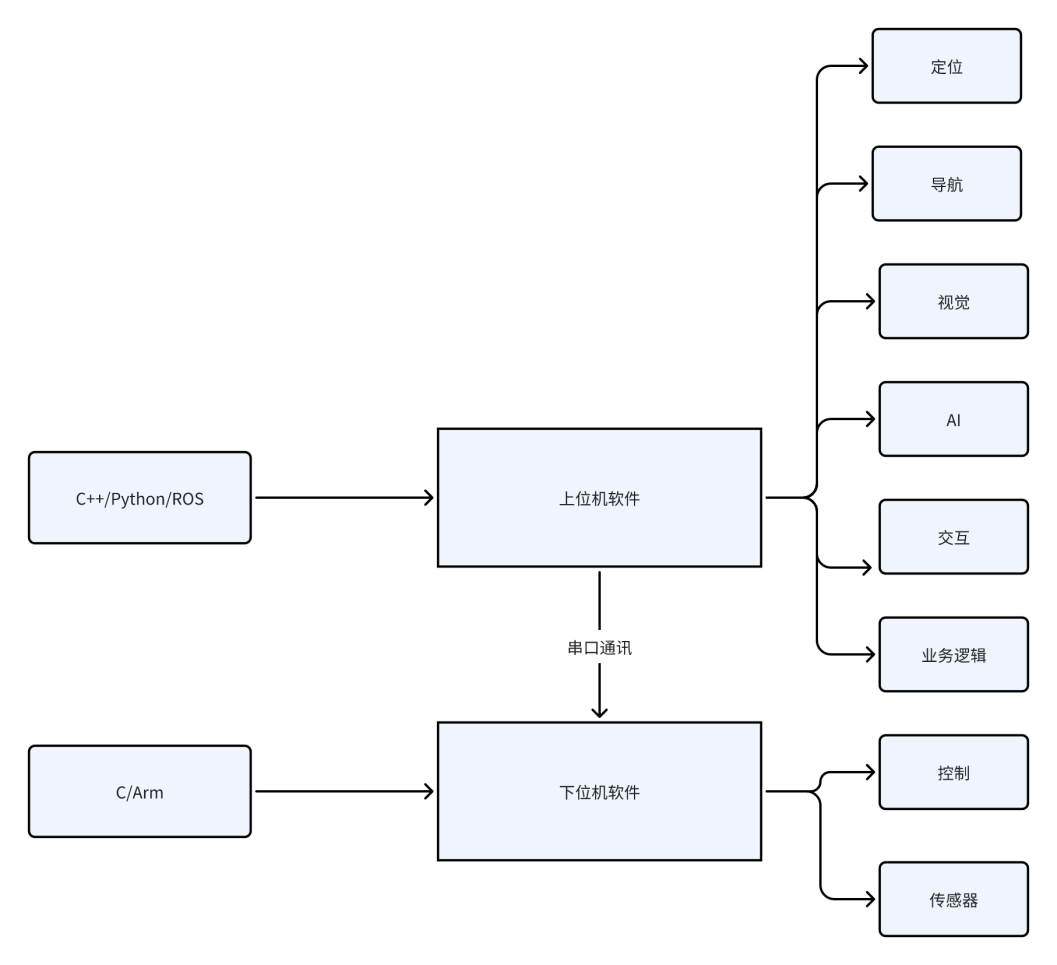
智行W2A的软件系统分为两部分,机载软件和开发软件。
智行W2A的机载软件分为上位机软件和下位机软件,上位机软件运行在AI核心处理器上,负责传感器信息处理,导航定位,AI,人机交互,机器人学运算,业务逻辑等功能,下位机软件运行在嵌入式控制器上,负责运动控制,传感器信息接收等功能。
开发软件包含开发的IDE,下位机开发软件,远程调试软件,传感器调试软件,数据标注工具,工具链平台,以及各种通讯和设备调试助手等等,以网盘+U盘的形式提供给客户。
| 软件名称 | 数量 | 主要功能参数 |
|---|---|---|
| 智行W2A上位机软件开发系统 | 1 | 基于ROS机器人操作系统,由若干功能包组成,包含了 1. 上下位机通信软件; 2. 雷达通信与滤波软件; 3. imu通信与滤波软件; 4. 相机通信与图像获取软件; 5. 碰撞传感器调试软件; 6. 超声传感器调试软件; 7. 基于激光雷达/超声的障碍检测软件; 8. 基于碰撞传感器的运动躲避软件; 9. 基于gmapping/cartographer的建图软件; 10. 基于amcl/cartographer的自主定位软件; 11. 基于movebase架构的自主导航软件; 12. 基于opencv颜色/形状特征的目标识别软件; 13. 基于深度学习的目标分割/检测/识别软件; 14. 基于机器人学运算的正逆解机械臂运动规划; 15. 基于视觉传感器+框选目标的目标跟踪软件; 16. 基于颜色/形状识别的机械臂的抓取软件; 17. 基于二维码识别的机械臂抓取软件; 18. 基于特征识别的机械臂抓取软件; 上述软件源码全部开放,预先部署在镜像中,基于ROS和C++/Python开发,可在使用说明中查阅; |
| 智行W2A下位机软件 | 1 | 基于国产嵌入式开发,与上位机通过串口通信,包含以下功能: 1. 接收上位机控制指令,执行相关动作; 2. 驱动直流电机以指定速度运动; 3. 驱动机械臂舵机调整角度; 4. 驱动机械臂舵机抓取物体; 5. 查询多路传感器信息,反馈给上位机; 6. 电源管理功能; |
| Visual Studio Code | 1 | 上位机开发的IDE,支持电脑远程SSH开发机载程序; |
| 远程连接软件 | 1 | 远程桌面,支持电脑远程访问机载处理器; |
| 数据标注工具 | 1 | 创建定制化标注任务、执行图像标注; |
| 工具链平台 | 1 | 提供tensorflow、pytorch、paddlepaddle等典型常用深度学习框架支持下的神经网络模型转换到核心处理器芯片可进行加速推理的转换工具。 |
| 其他常用工具 | 1 | 系统镜像烧录软件 系统镜像备份工具 串口调试助手 网络调试助手 ubuntu虚拟机 激光雷达调试软件 相机调试软件 IMU测试与标定软件 |
¶ 三.硬件使用说明
打开我们的W2A产品摆放到地上如下所示:

¶ 四.软件功能使用说明
需要注意的是,本产品使用需要有一定的Linux基本的操作基础,如果没有,请先阅读本书赠送的Linux基础指南,另外,本产品属于二次开发产品,开发需要具备一定的C++,Python与ROS基础,如果没有,请阅读Python,C++和ROS指南,感谢配合!
¶ 4.1远程连接Linux控制器
¶ 4.2上位机调试软件
¶ 4.3软件功能测试
¶ 4.4gazebo仿真
¶ 4.5APP部署
¶ 五.ROS二次开发接口
¶ 六、配套资源说明
1、竞赛调试请看《智能桌面清洁机器人竞赛调试指南》。
2、智能机器人综合实践配套课程,请查看《智行能机器人综合实践-智能桌面清洁机器人系统设计》。
3、本产品为二次开发产品,需要一定使用基础,Linux,Python,C++,ROS的基础知识请查看《产品使用软件基础》。
¶ 七、日常注意事项
¶ 7.1机器人充电
1、将12.6V5A充电器插入电源充电口即可进行充电。

2、正常充电时充电器指示灯为红色,充满时指示灯变绿。
¶ 7.2维护与保养
1、日常使用时,要经常检查轮子上和联轴处是否有异物缠绕,及时清理。
2、机械臂关节处,当出现异响或摩擦力较大时,可涂抹润滑油或链条油。
¶ 八、免责声明
1、为保护用户的合法权益,请您在使用本产品前务必仔细阅读我们随产品提供的使用手册或实验指导书、免责声明和安全须知,请您务必按照使用手册和安全须知操作本产品。北京博创尚和科技有限公司保留对上述文档进行更新的权利。
2、本产品不适合未满 18 周岁及其他不具备完全民事行为能力的人士使用,请您避免上述人士接触本产品,在有上述人士出现的场合操作时请您格外注意。
3、购买本产品前用户对本产品的功能、技术参数、安全性等都已清楚。一旦开始使用本产品,即视为用户已阅读、理解、认可和接受本产品的使用手册或实验指导书、免责声明和安全须知的全部条款和内容,用户对自已的行为及因此而产生的所有后果负责,北京博创尚和科技有限公司将不承担任何责任。
4、用户仅出于正当的目的使用本产品,使用本产品直接或间接发生的任何违反法律规定的行为,北京博创尚和科技有限公司将不承担任何责任。
¶ 九、安全须知
1、本产品配套锂电池,相关产品完全符合行业安全标准。对电池使用请遵循以下建议:
- 使用我司为本产品提供的专用的充电设备,当提示充满电时应及时停止充电。
- 当电池长时间不用时要进行充电存放,避免电池过放。
- 将电池存放于干燥通风处,避免阳光直射。若需存放超过三个月,推荐存放的温度区间为22摄氏度至28摄氏度。切勿将电池存放于低于零下10摄氏度或高于40摄氏度的场所。
- 当电池发生碰撞或跌落后,应立即检查电池外观、充放电接头是否有异物刺穿或线缆绝缘皮破损等情况。如发生剧烈碰撞或跌落,建议更换电池。
- 当电池发生鼓胀或充电时长不正常时及时切断电源。
- 电池充电时应置于安全区域,保持周边干燥,且无易燃易爆等物品。
- 避免在无人看守的情况下充电。
- 定期检查电池电量,当电池循环使用超过500次,建议更换新电池。
- 如果发生燃烧或爆炸现象,人员必须远离,在做好防护措施的前提下,可以采用二氧化碳或ABC干粉灭火器灭火或使用沙子直接覆盖燃烧或爆炸的电池,严禁使用水灭火。
2、本产品为室内使用设备,使用场地应保证平坦,坡度符合设备相关参数要求,室内因光照条件不足、部分功能使用可能受限制。
3、使用本产品时,应在零下10摄氏度至40摄氏度的环境中运行,应远离大功率发射设备等高电磁干扰的环境。
4、本产品为非防水设计,请勿在有地面积水或下雨、下雪、大雾环境中使用。
5、在使用本产品时,请始终保持设备在操作者目视范围内。
6、当有围观人群靠近时,请小心操控,避免发生意外。
7、本产品不可在饮酒、疲劳、服用药物、身体不适等情况下使用。
8、请在每次使用前对本产品进行检查,包括但不限于零部件的牢固度、机体的裂痕和磨损、电池电量、指示灯的有效性等。当发现异常时,请立即停止使用并更换相应配件。
9、请使用原厂配件进行维护和替换。
10、设备工作区内不得堆放任何物品和杂物。
11、使用完毕后按程序关闭好电源开关,清理好使用现场。
12、勿用力摇晃设备及在设备上悬挂超过参数要求的重物。
13、在设备使用中,勿有危险行为或游戏。
14、开机时机械臂会自动归位,请远离设备,小心不要被刮伤。
15、请确保设备在运动中不会与自身或其他物体产生剧烈碰撞。
16、请注意设备的旋转轴,防止电缆线、杂物的缠绕。请与轴保持距离,以防止头发 或衣服被缠绕。
17、如果设备已损坏,请勿继续使用。
18、请在设备参数范围与使用寿命内使用设备,否则会造成严重的安全问题。
19、转借给其他人员操作,请确保操作人员理解和遵守本安全须知。
20、请严格遵循本产品安全须知、使用手册的全部条款和内容。