¶ Demo 定位与导航案例测试脚本
定位导航案例包括了:
- gmapping建图
- cartographer建图
- 自主导航
¶ Gmapping建图
首先,请将机器人摆在地面,务必记得或标记出你的摆放位置,后续导航要用。
对于智行W2A,打开Linux用户文件夹下的robot_shell/w2a文件夹,运行7-gmapping.sh脚本:
cd ~/robot_shell/w2a
./7-gmapping.sh
对于智行W2C,打开Linux用户文件夹下的robot_shell/w2c文件夹,运行7-gmapping.sh脚本:
cd ~/robot_shell/w2c
./7-gmapping.sh
对于智行W2U,打开Linux用户文件夹下的robot_shell/w2u文件夹,运行7-gmapping.sh脚本:
cd ~/robot_shell/w2u
./7-gmapping.sh
对于智行W3S,打开Linux用户文件夹下的robot_shell/w3s文件夹,运行7-gmapping.sh脚本:
cd ~/robot_shell/w3s
./7-gmapping.sh
对于智行W4A,打开Linux用户文件夹下的robot_shell/w4a文件夹,运行7-gmapping.sh脚本:
cd ~/robot_shell/w4a
./7-gmapping.sh
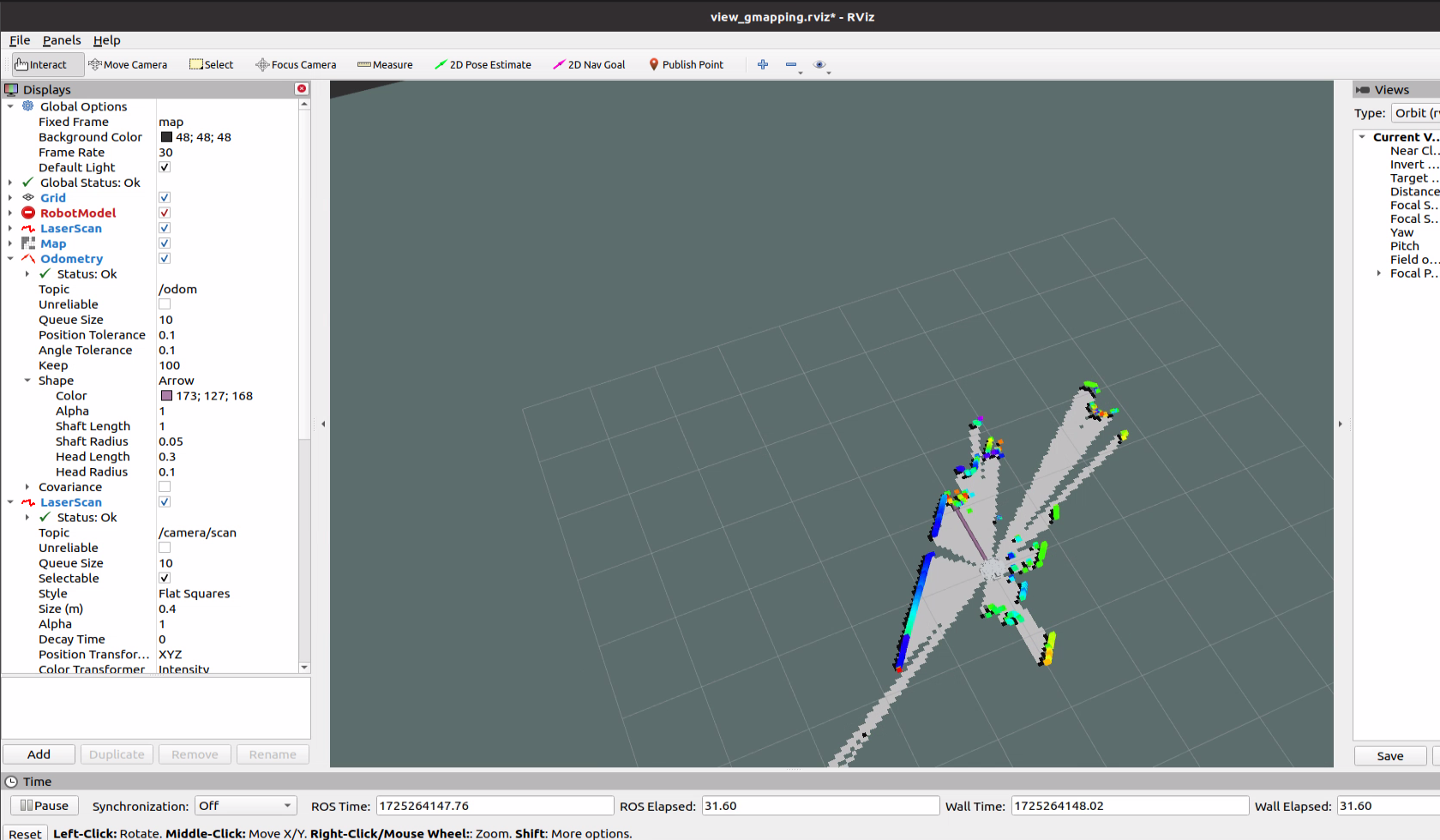
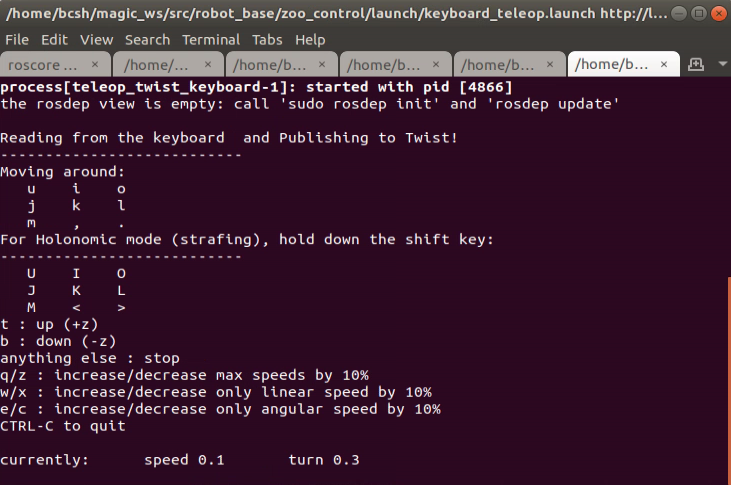
可以看到rviz里的地图,切换到最后一个tab,通过键盘控制进行建图:
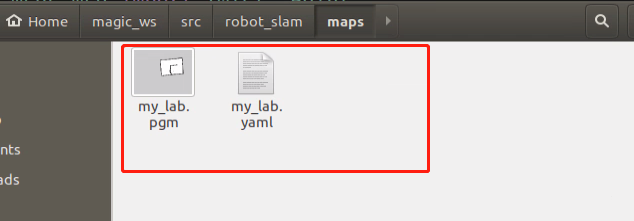
在rviz中把地图补全完成后,新打开一个命令行窗口输入如下命令,对地图进行保存:
roslaunch robot_slam save_map.launch
地图默认保存路径为robot_slam功能包下maps文件夹内,my_lab文件:
¶ Cartographer建图
首先,请将机器人摆在地面,务必记得或标记出你的摆放位置,后续导航要用。
对于智行W2A,打开Linux用户文件夹下的robot_shell/w2a文件夹,运行8-cartographer_mapping.sh脚本:
cd ~/robot_shell/w2a
./8-cartographer_mapping.sh
对于智行W2C,打开Linux用户文件夹下的robot_shell/w2c文件夹,运行8-cartographer_mapping.sh脚本:
cd ~/robot_shell/w2c
./8-cartographer_mapping.sh
对于智行W2U,打开Linux用户文件夹下的robot_shell/w2u文件夹,运行8-cartographer_mapping.sh脚本:
cd ~/robot_shell/w2u
./8-cartographer_mapping.sh
对于智行W3S,打开Linux用户文件夹下的robot_shell/w3s文件夹,运行8-cartographer_mapping.sh脚本:
cd ~/robot_shell/w3s
./8-cartographer_mapping.sh
对于智行W4A,打开Linux用户文件夹下的robot_shell/w4a文件夹,运行8-cartographer_mapping.sh脚本:
cd ~/robot_shell/w4a
./8-cartographer_mapping.sh
得到如下场景:
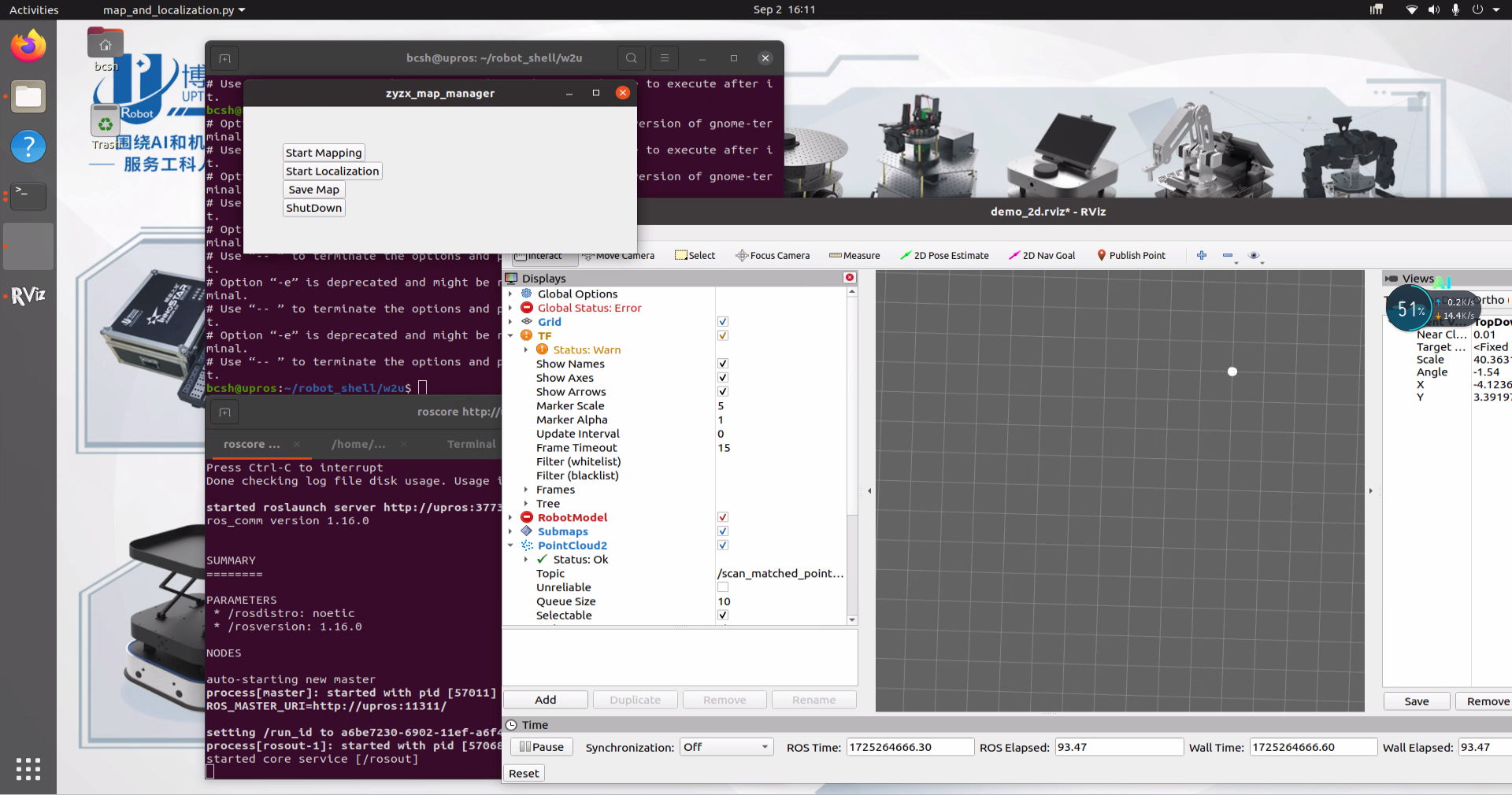
点击界面中的 Start Mapping按钮,即可打开建图。
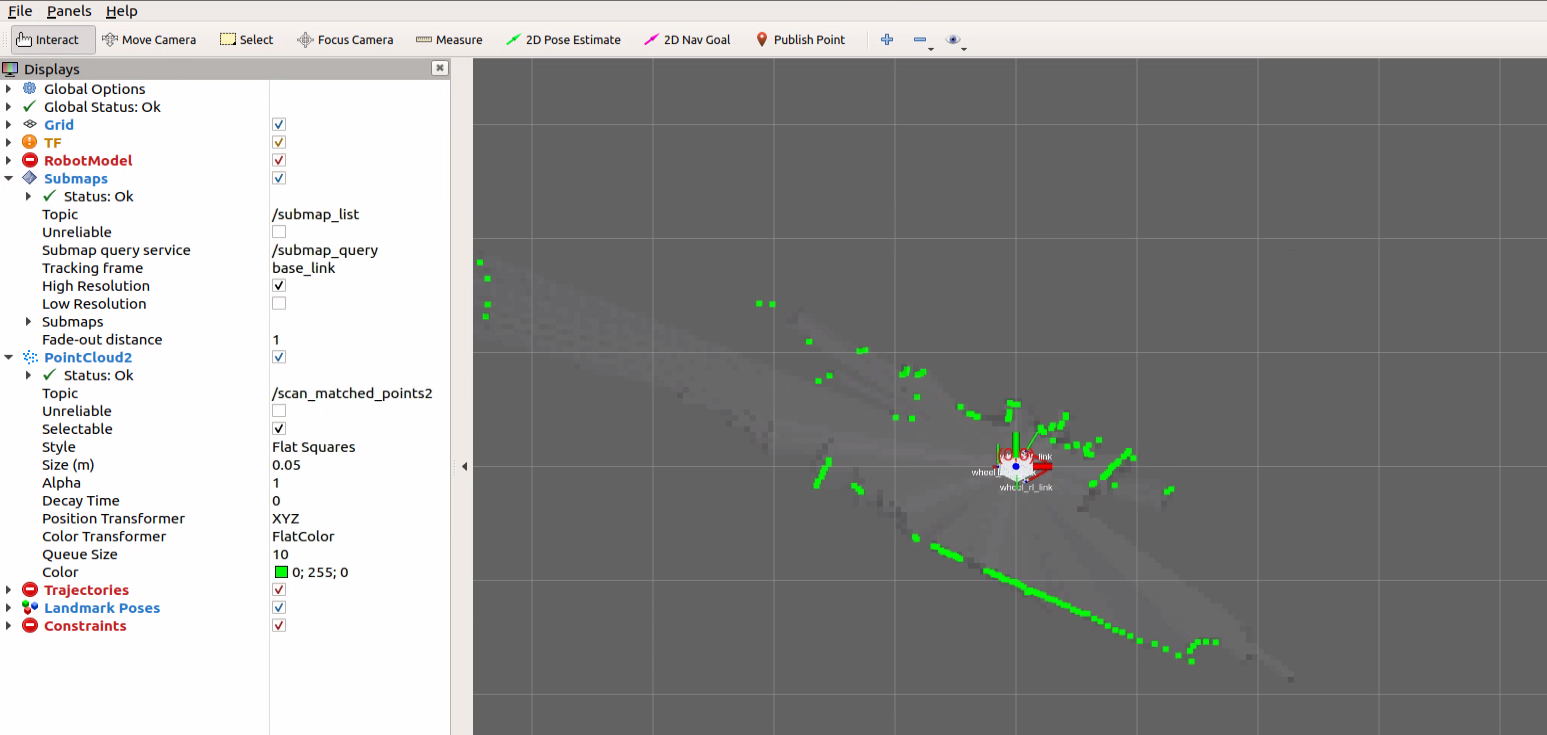
可以看到rviz里的地图,切换到最后一个tab,通过键盘控制进行建图:
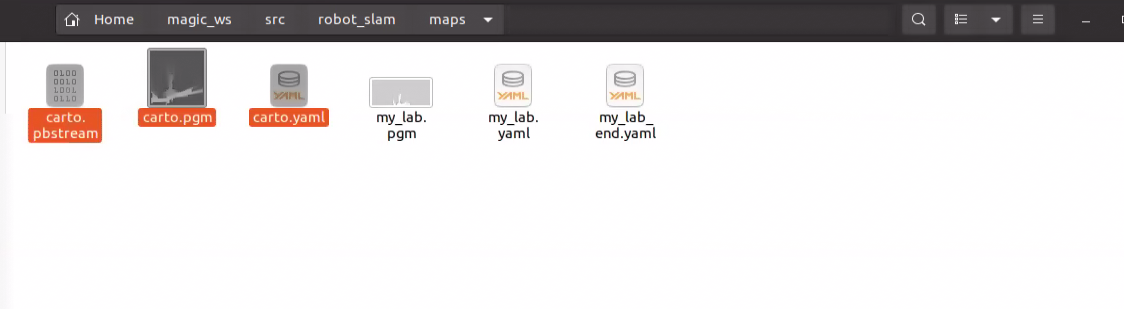
建图完成后,点击界面中的 Save Map 按钮,即可保存地图。
地图默认保存路径为robot_slam功能包下maps文件夹内,carto文件:
本产品功能默认使用cartographer来建图,定位,gampping框架陈旧落后,不做维护。
¶ 自主导航
运行此步骤前,请确保你已经在上一步建立了地图,并保存在了指定位置!!!!
然后,务必关闭所有程序,将机器人摆放回建图的初始位置!
对于智行W2A,打开Linux用户文件夹下的robot_shell/w2a文件夹,运行10-navigation.sh脚本:
cd ~/robot_shell/w2a
./10-navigation.sh
对于智行W2C,打开Linux用户文件夹下的robot_shell/w2c文件夹,运行10-navigation.sh脚本:
cd ~/robot_shell/w2c
./10-navigation.sh
对于智行W2U,打开Linux用户文件夹下的robot_shell/w2u文件夹,运行10-navigation.sh脚本:
cd ~/robot_shell/w2u
./10-navigation.sh
对于智行W3S,打开Linux用户文件夹下的robot_shell/w3s文件夹,运行10-navigation.sh脚本:
cd ~/robot_shell/w2s
./10-navigation.sh
对于智行W4A,打开Linux用户文件夹下的robot_shell/w4a文件夹,运行10-navigation.sh脚本:
cd ~/robot_shell/w4a
./10-navigation.sh
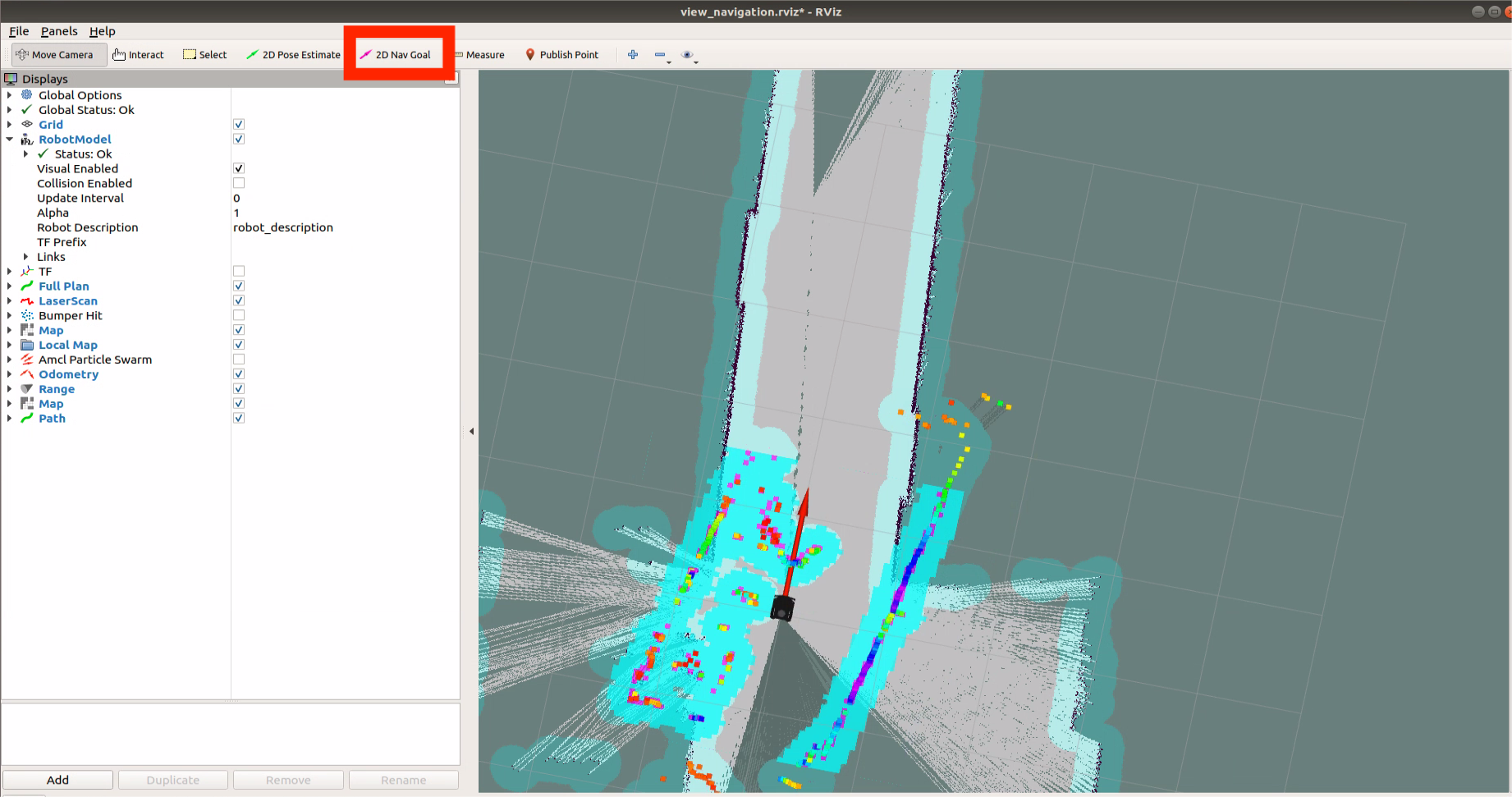
可以看到出现如下界面:
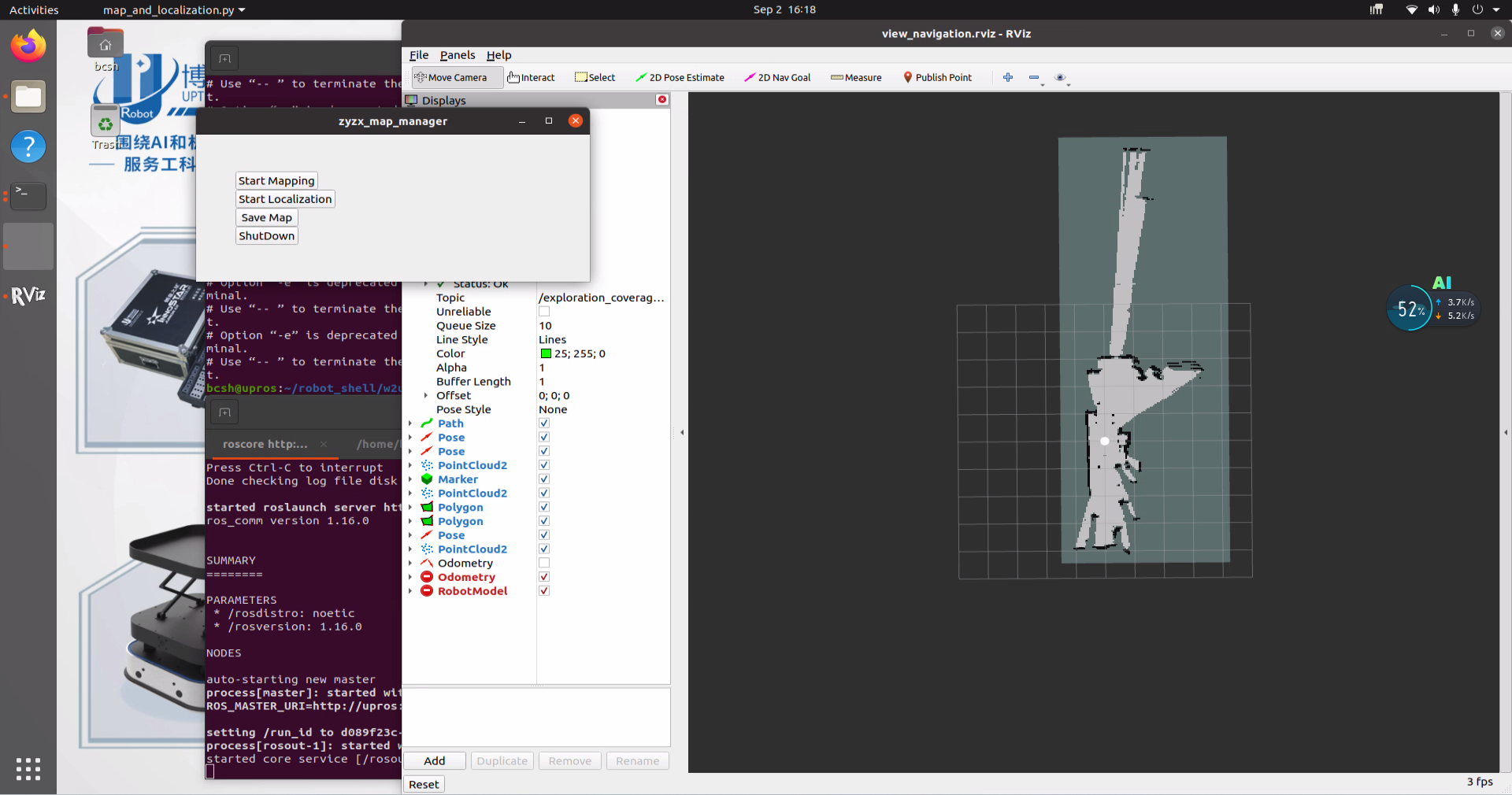
点击Start Localization 按钮先启动定位,即可看到就启动了导航系统:
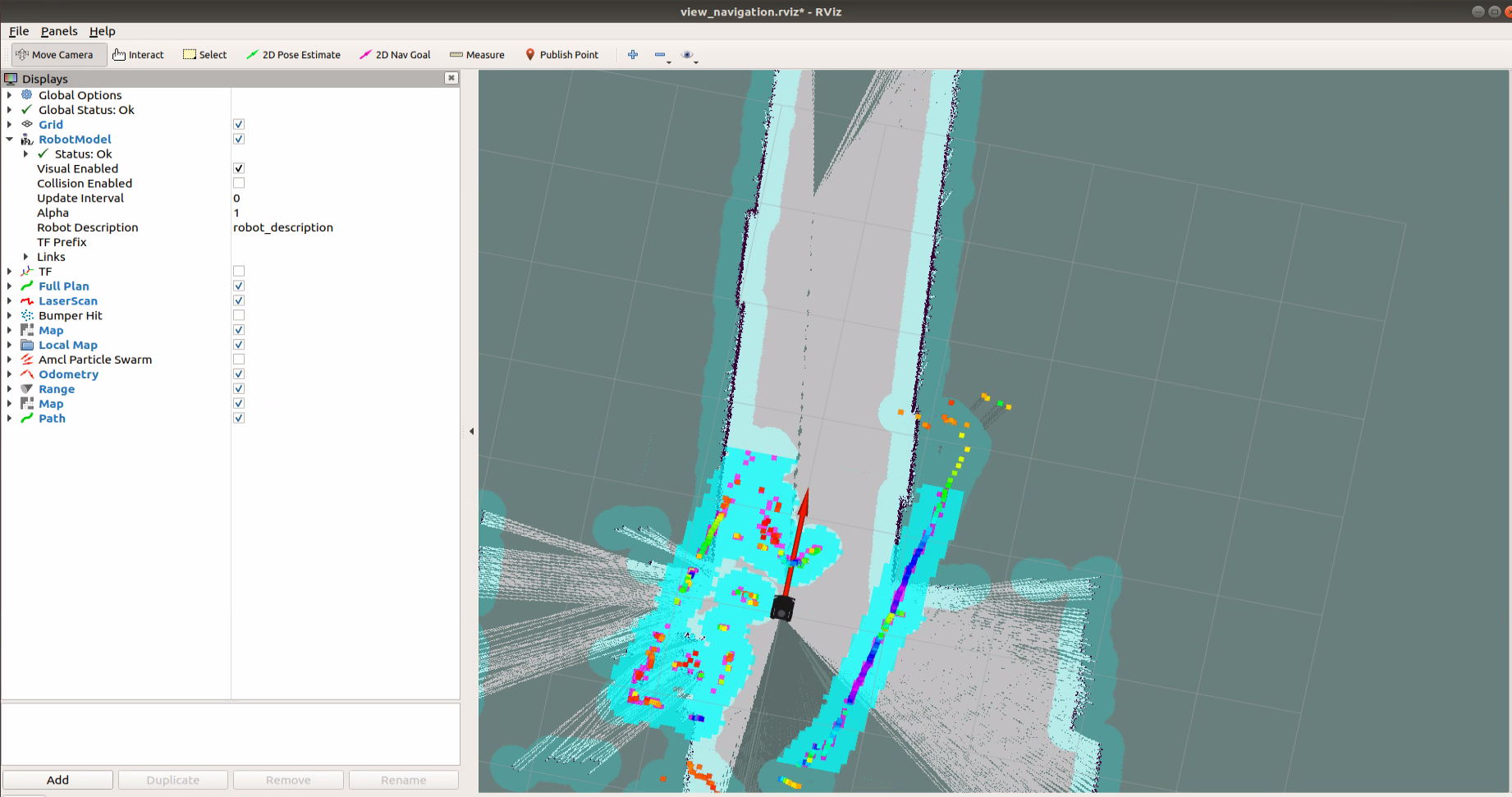
点击下图红框中的2D Nav Goal那个箭头,然后拖拽鼠标在地图中点击想要让机器人去的地方并调整朝向,机器人就会自动规划路径,然后朝着目标点行驶了。