¶ Demo基础案例测试脚本
卓越之星与智行相关的案例测试,封装成了很多脚本,可以直接运行,测试功能正常。
在robot_shell文件夹下,有与产品同名的文件夹,放置了不同智行产品的功能测试脚本与同名卓越之星构型脚本。
请执行脚本时选择对应产品文件夹内同功能名称的脚本
基础案例包括了:
- 键盘控制底盘运动
- 相机启动与图像展示
- 雷达Rviz数据展示
- 自主前进与雷达识别障碍停止运动
- 获取当前里程计位姿
- 按照里程计前进1米
¶ 键盘控制底盘运动
对于智行W2A,打开Linux用户文件夹下的robot_shell/w2a文件夹,运行1-keyboard_control.sh脚本:
cd ~/robot_shell/w2a
./1-keyboard_control.sh
对于智行W2C,打开Linux用户文件夹下的robot_shell/w2c文件夹,运行1-keyboard_control.sh脚本:
cd ~/robot_shell/w2c
./1-keyboard_control.sh
对于智行W2U,打开Linux用户文件夹下的robot_shell/w2u文件夹,运行1-keyboard_control.sh脚本:
cd ~/robot_shell/w2u
./1-keyboard_control.sh
对于智行W3S,打开Linux用户文件夹下的robot_shell/w3s文件夹,运行1-keyboard_control.sh脚本:
cd ~/robot_shell/w3s
./1-keyboard_control.sh
对于智行W4A,打开Linux用户文件夹下的robot_shell/w4a文件夹,运行1-keyboard_control.sh脚本:
cd ~/robot_shell/w4a
./1-keyboard_control.sh
Linux命令行输入,执行上面的脚本。
切到弹出来的终端的第三个窗口,根据提示控制键盘进行前后左右移动和转向:
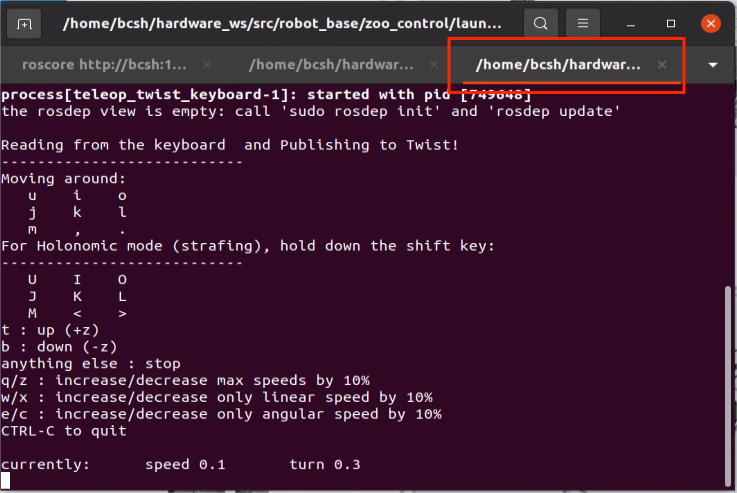
键盘控制按键:
i:前进
k:停止
<:后退
j:左转
l:右转
J:左平移(仅全向平台W3S,W4A可用)
L:右平移(仅全向平台W3S,W4A可用)
¶ 相机测试
对于智行W2A,打开Linux用户文件夹下的robot_shell/w2a文件夹,运行2-usb_cam.sh脚本:
cd ~/robot_shell/w2a
./2-usb_cam.sh
对于智行W2C,打开Linux用户文件夹下的robot_shell/w2c文件夹,运行2-orbbec_camera.sh脚本:
cd ~/robot_shell/w2c
./2-orbbec_camera.sh
对于智行W2U,打开Linux用户文件夹下的robot_shell/w2u文件夹,运行2-usb_cam.sh脚本:
cd ~/robot_shell/w2u
./2-usb_cam.sh
对于智行W3S,打开Linux用户文件夹下的robot_shell/w3s文件夹,运行2-usb_cam.sh脚本:
cd ~/robot_shell/w3s
./2-orbbec_camera.sh
对于智行W4A,打开Linux用户文件夹下的robot_shell/w4a文件夹,运行2-orbbec_camera.sh脚本:
cd ~/robot_shell/w4a
./2-orbbec_camera.sh
¶ 激光雷达测试
对于智行W2A,打开Linux用户文件夹下的robot_shell/w2a文件夹,运行3-lidar.sh脚本:
cd ~/robot_shell/w2a
./3-lidar.sh
对于智行W2C,打开Linux用户文件夹下的robot_shell/w2c文件夹,运行3-lidar.sh脚本:
cd ~/robot_shell/w2c
./3-lidar.sh
对于智行W2U,打开Linux用户文件夹下的robot_shell/w2u文件夹,运行3-lidar.sh脚本:
cd ~/robot_shell/w2u
./3-lidar.sh
对于智行W3S,打开Linux用户文件夹下的robot_shell/w3s文件夹,运行3-lidar.sh脚本:
cd ~/robot_shell/w3s
./3-lidar.sh
对于智行W4A,打开Linux用户文件夹下的robot_shell/w4a文件夹,运行3-lidar.sh脚本:
cd ~/robot_shell/w4a
./3-lidar.sh
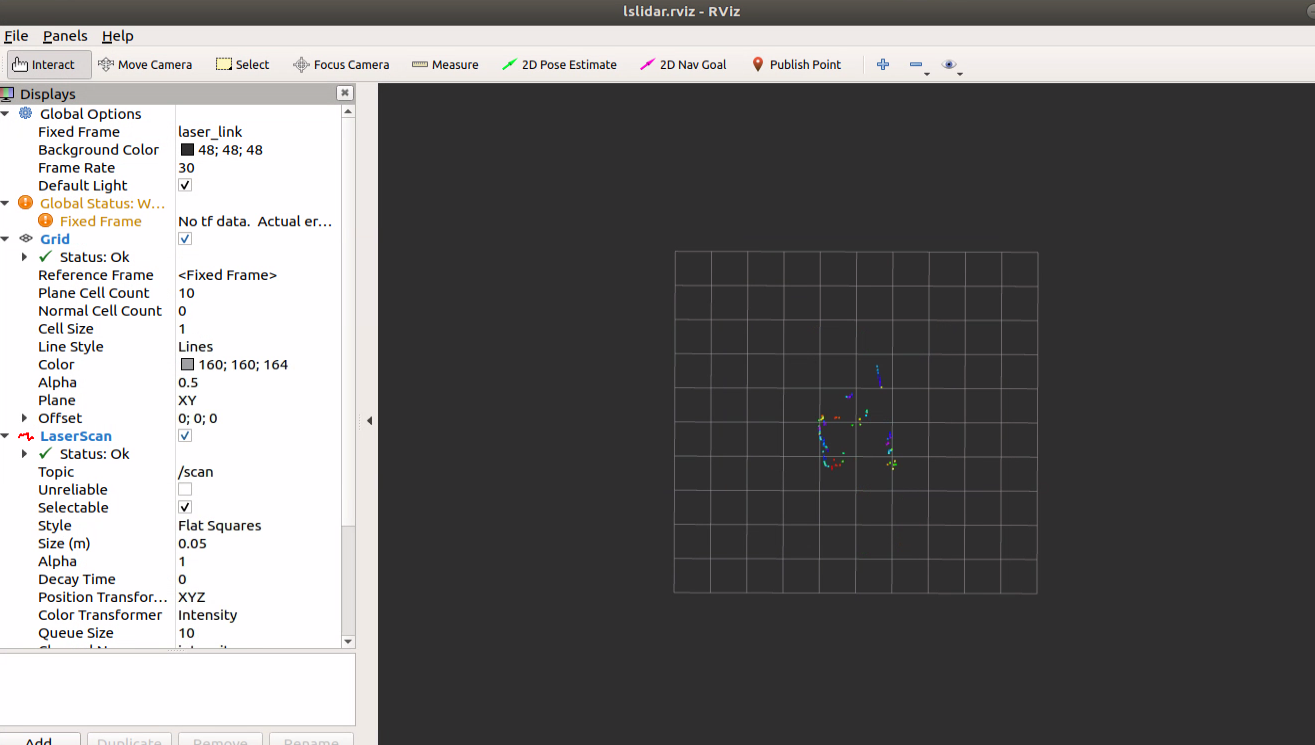
新建一个命令行终端,输入rviz,打开rviz :

修改 Fixed Frame 为 laser_link ,并订阅激光雷达topic:

可以在rviz里看到激光雷达的点云数据:
¶ 激光雷达避障
这个demo实现的,是激光雷达探索到机器人前方的障碍物,并在识别到障碍物时停止运动。
对于智行W2A,打开Linux用户文件夹下的robot_shell/w2a文件夹,运行4-go_and_stop.sh脚本:
cd ~/robot_shell/w2a
./4-go_and_stop.sh
对于智行W2C,打开Linux用户文件夹下的robot_shell/w2c文件夹,运行4-go_and_stop.sh脚本:
cd ~/robot_shell/w2c
./4-go_and_stop.sh
对于智行W2U,打开Linux用户文件夹下的robot_shell/w2u文件夹,运行4-go_and_stop.sh脚本:
cd ~/robot_shell/w2u
./4-go_and_stop.sh
对于智行W3S,打开Linux用户文件夹下的robot_shell/w3s文件夹,运行4-go_and_stop.sh脚本:
cd ~/robot_shell/w3s
./4-go_and_stop.sh
对于智行W4A,打开Linux用户文件夹下的robot_shell/w4a文件夹,运行4-go_and_stop.sh脚本:
cd ~/robot_shell/w4a
./4-go_and_stop.sh
切换到最后一个tab:
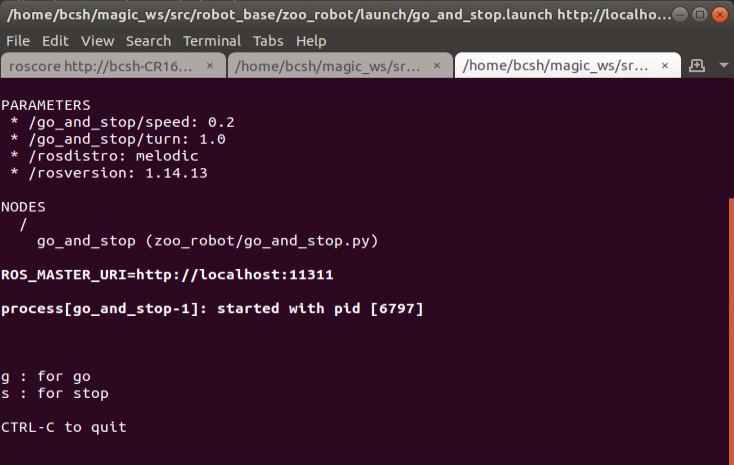
这时只要按下键盘的g,智行W2A就会开始向前移动,当前方半米出现障碍物时停止移动。按下键盘的s,会停止移动。
¶ 机器人位置信息获取
这个demo实现的功能,是获取轮式里程计与IMU融合后计算出的,当前的机器人的位置。
对于智行W2A,打开Linux用户文件夹下的robot_shell/w2a文件夹,运行5-get_pose_demo.sh脚本:
cd ~/robot_shell/w2a
./5-get_pose_demo.sh
对于智行W2C,打开Linux用户文件夹下的robot_shell/w2c文件夹,运行5-get_pose_demo.sh脚本:
cd ~/robot_shell/w2c
./5-get_pose_demo.sh
对于智行W2U,打开Linux用户文件夹下的robot_shell/w2u文件夹,运行5-get_pose_demo.sh脚本:
cd ~/robot_shell/w2u
./5-get_pose_demo.sh
对于智行W3S,打开Linux用户文件夹下的robot_shell/w3s文件夹,运行5-get_pose_demo.sh脚本:
cd ~/robot_shell/w3s
./5-get_pose_demo.sh
对于智行W4A,打开Linux用户文件夹下的robot_shell/w4a文件夹,运行5-get_pose_demo.sh脚本:
cd ~/robot_shell/w4a
./5-get_pose_demo.sh
切换到最后一个tab里即可查看机器人当前的位置信息:
¶ 基于里程计的运动控制
本demo展示如何根据里程计位姿信息移动一定的距离。
对于智行W2A,打开Linux用户文件夹下的robot_shell/w2a文件夹,运行6-move_linear.sh脚本:
cd ~/robot_shell/w2a
./6-move_linear.sh
对于智行W2C,打开Linux用户文件夹下的robot_shell/w2c文件夹,运行6-move_linear.sh脚本:
cd ~/robot_shell/w2c
./6-move_linear.sh
对于智行W2U,打开Linux用户文件夹下的robot_shell/w2u文件夹,运行6-move_linear.sh脚本:
cd ~/robot_shell/w2u
./6-move_linear.sh
对于智行W3S,打开Linux用户文件夹下的robot_shell/w3s文件夹,运行6-move_linear.sh脚本:
cd ~/robot_shell/w3s
./6-move_linear.sh
对于智行W4A,打开Linux用户文件夹下的robot_shell/w4a文件夹,运行6-move_linear.sh脚本:
cd ~/robot_shell/w4a
./6-move_linear.sh
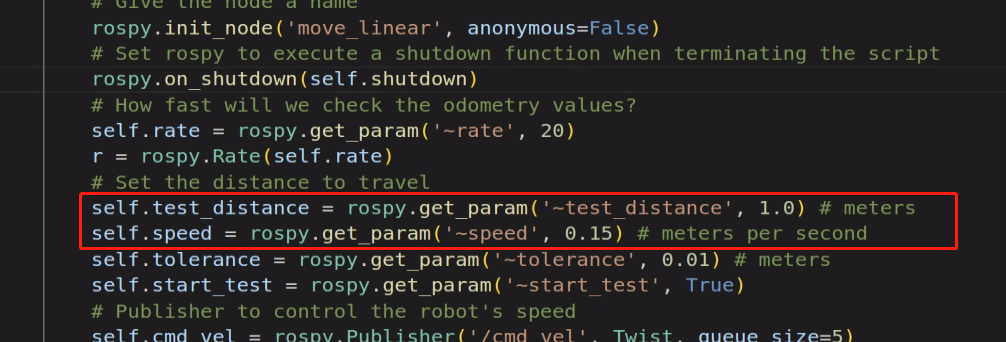
运行程序后,机器人会以 0.15m/s 的速度向前行驶1m的距离,代码在zoo_robot软件包下的move_linear.py文件,修改速度以及测试距离可以在这里修改,test_distance为距离,speed为速度: