¶ 智元素体感格斗机器人-移植版
本仓库的内容为智元素体感格斗机器人体感控制程序的移植版。
原始程序使用C#编写,具有图形化的操作界面。
本移植程序目前仅移植核心控制功能,不包含有图形界面, 不包含网络功能。
¶ 系统环境
- 硬件: RK3588
- 系统: Linux
- 语言: python3.8.8
¶ 功能
- 手臂动作映射到机械臂
- 脚部传感器控制底盘运动
- 技能模式
- 控制模式切换
- 动作编辑器(目前不开发)
¶ 使用方法
¶ 硬件介绍
整个所需硬件如下:
- 机器人本体 x1
- IMU传感器 x6 + IMU接收机 x1
- 传感器绑带 x6
¶ 传感器介绍
传感器单体如下:
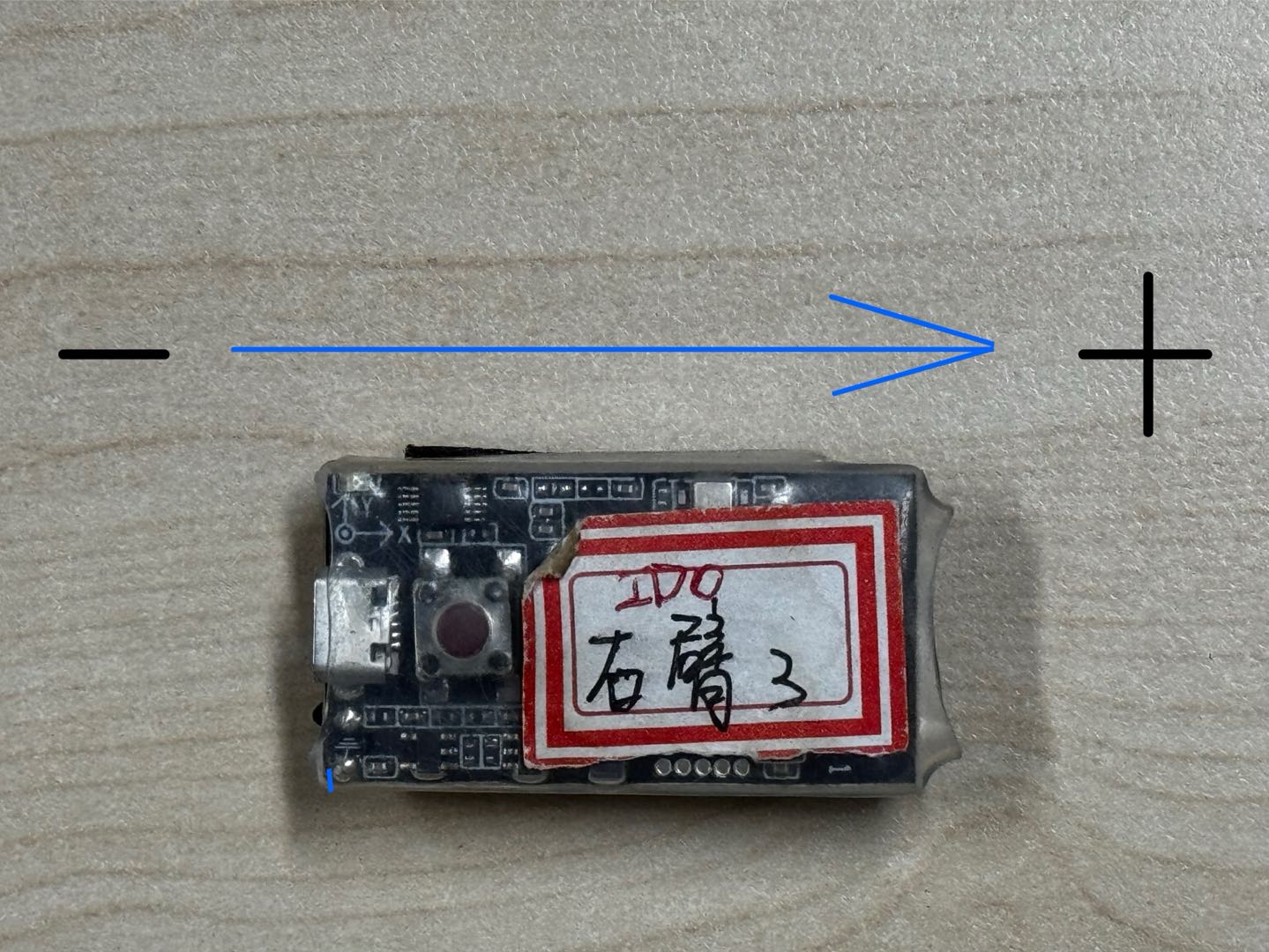
上图所标的箭头方向记为传感器的正方向,佩戴的时候需要注意方向.
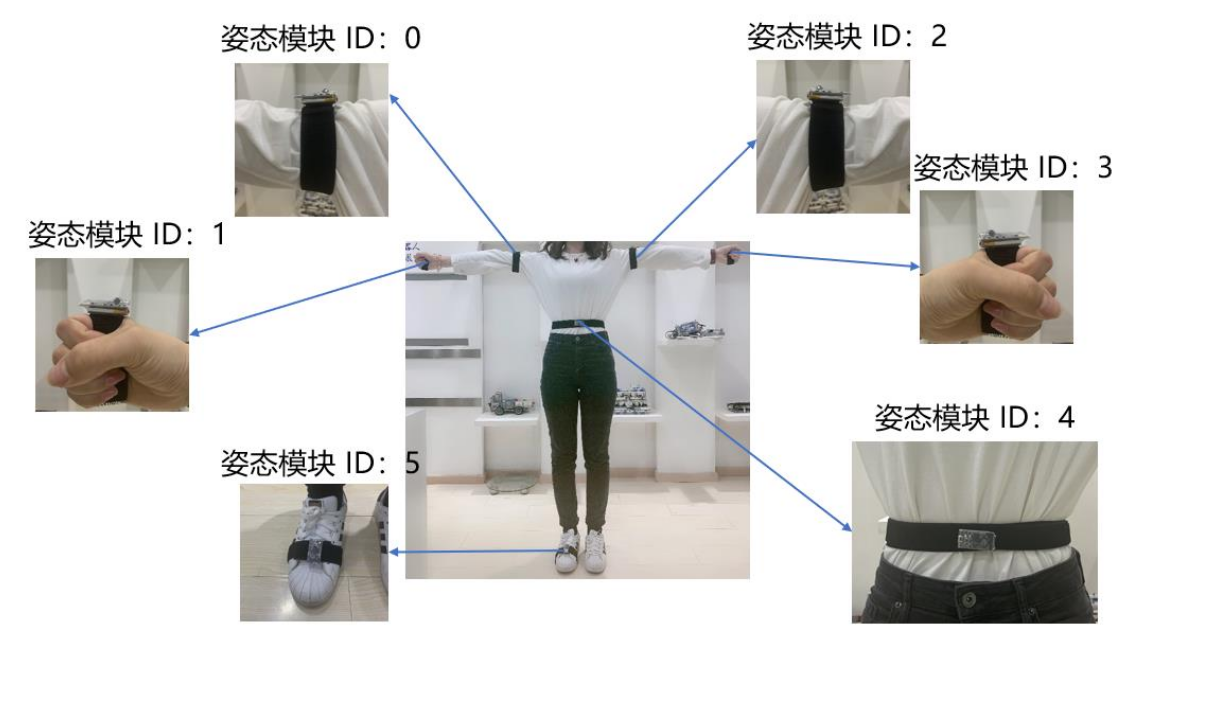
一共有六个传感器,其分别有编号为, ID0 ~ ID5 定义如下:
- ID0: 右臂
- ID1: 右手
- ID2: 左臂
- ID3: 左手
- ID4: 腰部
- ID5: 脚部
- IMU接收机: 用于接收传感器数据, 通过USB连接到鲁班猫

注意: 传感器ID0 ~ ID5的编号设置方式请参见文档 智元素体感应用说明书V1.6 的 2.2.1 ~ 2.2.3 节的内容。
¶ 传感器佩戴方式
- ID0 ~ ID3 分别对应右臂, 右手, 左臂, 左手四个部位, 需要绑在手臂上, 注意正方向
以右臂和右手为例, 佩戴方式如下:

左手左臂也以同样的方式佩戴。
佩戴原则如下:
- 左右传感器的
正方向均为从肩膀->指间 - 当胳膊侧平举,且掌心向前时, 传感器的位置应该尽量与
地面水平,左/右肩膀->左/右臂传感器->左/右手部三点一线
- ID4 对应腰部传感器,通过绑带系于腰间

佩戴原则:
- 其方向应水平于地面
- 不强制要求正方向的指向
- ID5 对应脚部传感器,通过绑带系于鞋面

佩戴原则:
- 方向朝向角尖
- 不强制要求正方向的指向
- 尽量选择鞋面较为平的鞋, 使传感器尽可能与地面水平。
整体穿戴图:
上图所表示的姿势也是系统初始化时候需要作出的标准姿势。
¶ 姿态控制软件介绍
注意, 运行软件前请先将传感器平放在桌面上,长按开关进行上电,然后按照佩戴原则佩戴传感器。
本项目软件位于~/uptech_zys_combat_robot
运行方法:
在终端中进行如下操作:
cd ~/uptech_zys_combat_robot
./run.sh
此时界面如下:
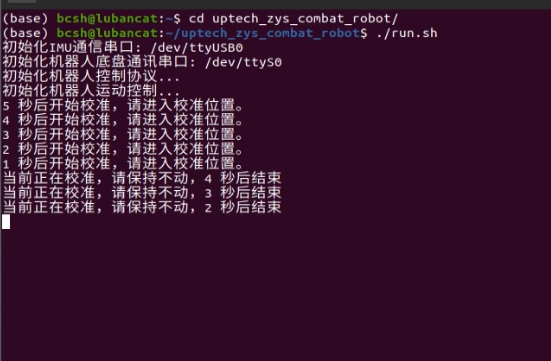
执行程序后, 会有如下内容:
- 先有一个5秒的倒计时准备时间, 方便测试人员作出整体穿戴图所示的标准姿势
- 然后会进行5秒的校准,在这5秒内, 请保持静止不动, 等待校准完成。
- 倒计时结束后, 会进入姿态控制界面。

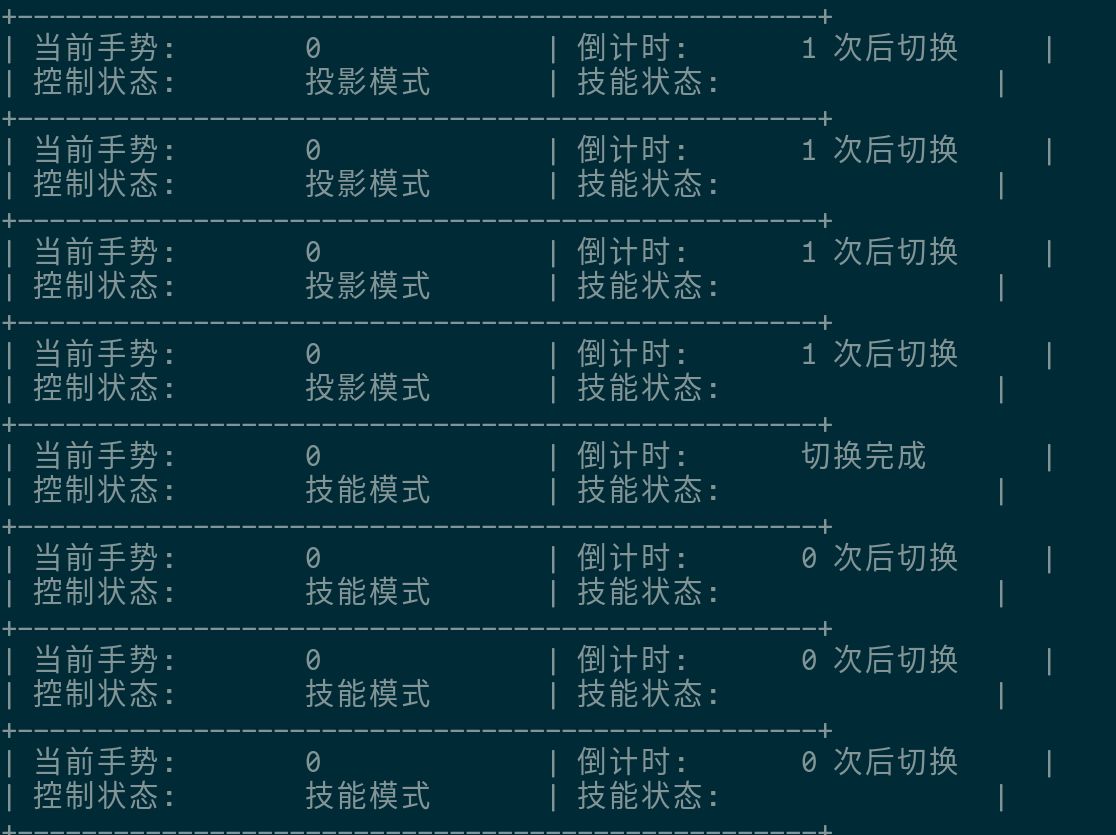
姿态控制界面有四个属性,分别如下:
- 当前手势: 用于
控制状态的切换, 以及技能模式下通过不同手势释放技能。 - 控制状态: 表示当前机器人当前的控制模式, 目前的控制模式有
投影模式和技能模式, 默认为投影模式。 - 倒计时: 用于切换
控制状态的提示,表示需要保持切换状态手势所需要的剩余时间,为了防止单次无意操作所造成的误操作。 - 技能状态: 技能的执行需要时间,在此时间内,提示用户的输入会被屏蔽。
¶ 具体操作方法
6个姿态IMU传感器共分为三组:
- ID0~ID3 为一组,用于控制上肢的运动
- ID4为一组,作为整个系统的基准IMU
- ID5为一组,用于控制机器人底盘运动
上面提到控制状态 分为 投影模式 和 技能模式, 这是针对上肢而言。两个状态下的底盘控制方式一样。 我们先来讲如何控制底盘运动。
¶ 底盘操控方式
请直接参考视频:
基本操控方式:
- 脚掌着地,脚尖向左/右转动,则机器人向左右旋转。
- 脚尖点地,抬起脚跟,机器人前进。
- 脚跟着地,抬起脚尖,机器人后退。
- 脚掌着地,脚尖指向前方,停止运动。
注意: 控制为速度控制,也就是当脚进行控制时,只要不指向前方,则会一直运动下去。
¶ 上肢操控方式
上肢我们主要用过ID0~ID3这四个IMU来进行操控, 系统默认启动为投影模式。
投影模式
投影模式下,机器人上肢的运动状态与操控人员运动状态一致,即操控人员抬起胳膊, 机器人也抬起胳膊。

技能模式
该模式下, 用户需要将手臂移动到一个或者若干个位置,激活该位置所对应的机器人任务指令或者组合动作。
预定位置和机器人任务,动作需要预先在动作编辑器中创建。 (暂未开放)
目前的技能有:
- wave_hands: 激活方式为 双臂向前伸直, 与地面水平, 掌心相对。其技能代码为
2

注意: 技能为瞬发,即只要识别到一次wave_hands指令,机器人就会执行一次动作。
模式切换
在任意模式下,双臂向前伸直,与地面水平, 手掌向上转动,手心竖直朝向天空, 其手势代码为0。
注意: 切换指令为延迟操作,即需要连续多次检测到相同的切换指令,才会进行切换。具体延迟长度请关注
倒计时和控制状态。
手势代码表
-1: 未定义
0: 模式切换
1: 预留
2: wave_hands