¶ AprilTag 检测与定位
AprilTag是密歇根大学Edwin Olson教授及其实验团队率先提出的一个视觉基准系统,可用于各种任务,包括增强现实、机器人和相机校准。
可以从普通打印机创建目标,AprilTag 检测软件可以计算标签相对于相机的精确 3D 位置、方向和标识。

AprilTags 在概念上类似于 QR 码,因为它们是一种二维条形码。然而,它们被设计用于编码更小的数据有效载荷(4 到 12 位之间),从而能够更可靠地从更远的距离进行检测。
此外,它们专为高定位精度而设计——可以计算 出AprilTag 相对于相机的精确 3D 位置。
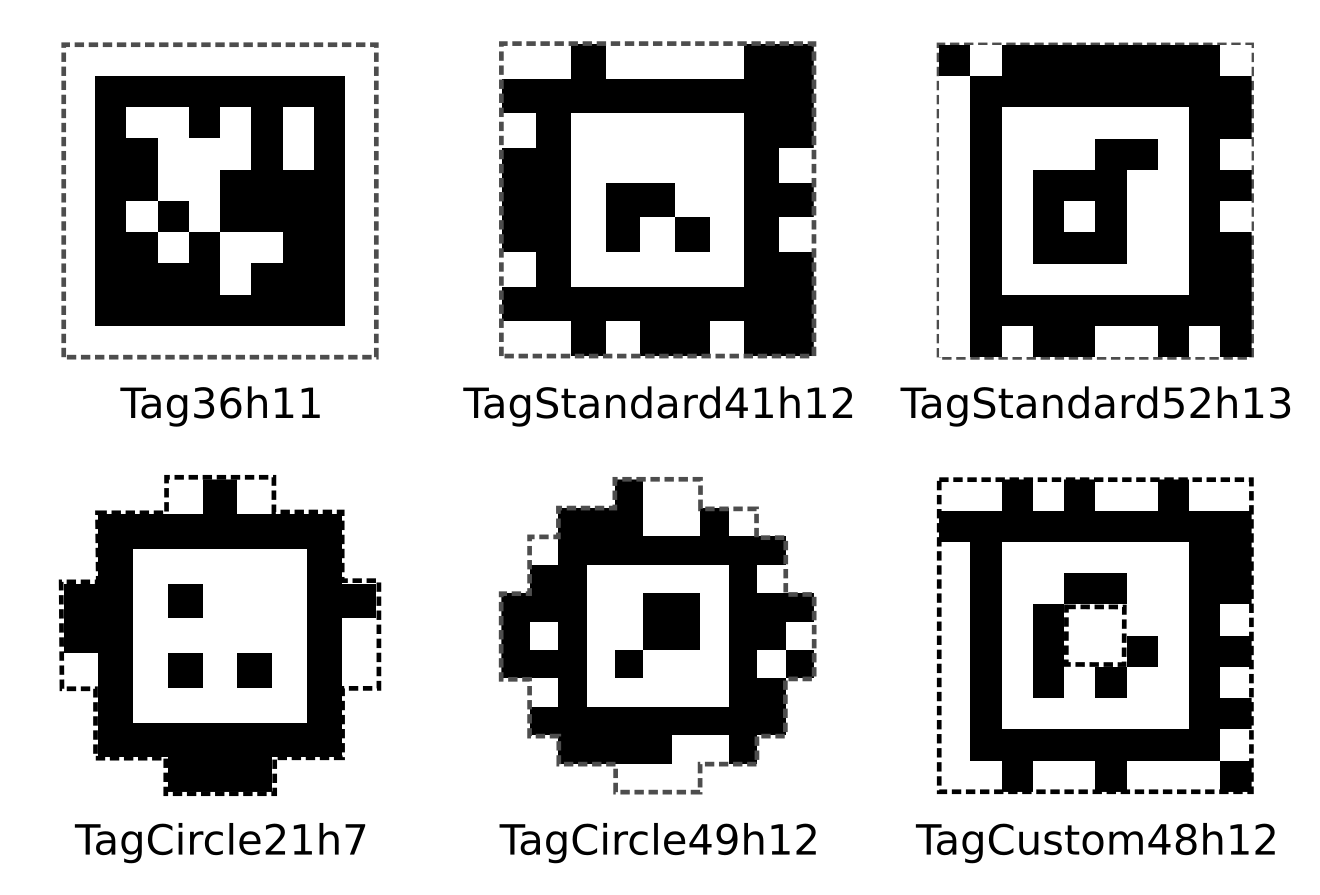
AprilTag有不同的家族,家族包括不同尺寸和容错率的标签,以适应不同的应用场景。如下所示为不同的Apriltag家族。
一般来说,我们进行AprilTag识别算法步骤如下:
- 自适应阈值分割
- 查找轮廓,使用Union-find查找连通域
- 对轮廓进行直线拟合,查找候选的凸四边形
- 对四边形进行解码,识别Tag
- 坐标变换,转换到世界坐标系
- 快速解码,精准定位
但是很多开源的软件都会包含函数来识别apriltag,我们只需要调用即可,例如python的apriltag库,ros的apriltag_ros
接下来我们基于python的apriltag实现,示例代码如下所示:
import cv2
import apriltag
def detect_apriltags(image_path):
# 读取图像
image = cv2.imread(image_path)
if image is None:
print("无法读取图像文件")
return
# 创建AprilTag检测器对象
detector = apriltag.Detector(families='tag36h11')
# 检测AprilTag
results = detector.detect(image)
# 遍历检测结果
for result in results:
# 提取AprilTag的数据
tag_data = result.tag_id
print("AprilTag数据: ", tag_data)
# 在图像上绘制AprilTag的位置框
for idx in range(len(result.corners)):
cv2.line(image, tuple(result.corners[idx-1, :].astype(int)), tuple(result.corners[idx, :].astype(int)), (0, 255, 0), 2)
# 显示带有AprilTag检测框的图像
cv2.imshow("AprilTag Detection", image)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == "__main__":
# 指定要检测的图像路径
image_path = "path_to_your_apriltag_image.png"
detect_apriltags(image_path)
在上述代码中,我们首先使用OpenCV库读取图像文件。
然后,我们创建了一个apriltag.Detector对象,并指定要检测的AprilTag家族类型(在此示例中为tag36h11)。
接下来,我们使用detector.detect方法对图像进行AprilTag检测。
最后,我们遍历检测结果,提取AprilTag的数据,并在原始图像上绘制位置框来显示AprilTag的位置。
运行程序后,它将显示一个带有AprilTag检测框的图像,并打印出每个检测到的AprilTag的数据。
识别结果如下:
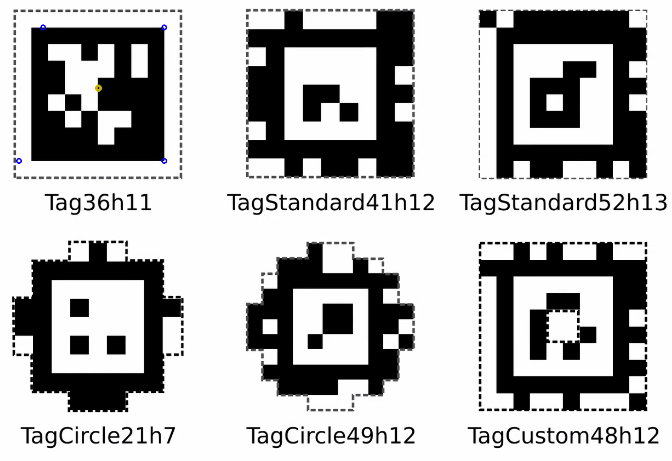
可以看到左上角识别出了36h11的apriltag图标。