¶ 基于HOG特征的行人检测
¶ HOG特征
HOG特征(Histogram of Oriented Gradients,方向梯度直方图)是一种用于图像识别和目标检测的特征描述子。它的核心思想是通过计算图像中局部区域的梯度方向直方图来表示图像的特征。
HOG特征的计算过程包括以下几个步骤:
- 图像预处理:将输入图像转换为灰度图像,并进行归一化处理。
- 计算梯度:对图像进行梯度计算,得到每个像素的梯度方向和强度。
- 划分图像:将图像划分成小的局部区域,称为cell,每个cell内包含多个像素。
- 计算直方图:对每个cell内的像素梯度方向进行统计,得到梯度方向直方图。
- 归一化直方图:对每个cell的梯度方向直方图进行归一化,以减少光照变化的影响。
- 特征向量组合:将所有cell的归一化直方图组合起来,形成整个图像的特征向量。
HOG特征的优点在于具有旋转不变性和光照不变性,能够有效地描述物体的形状和纹理信息。它在目标检测任务中表现出色,尤其适用于检测具有明显边缘和纹理特征的物体。因此,在计算机视觉领域,HOG特征被广泛应用于行人检测、人脸识别等任务。
¶ 基于HOG的行人检测
import cv2
import numpy as np
def detect_pedestrians(image_path):
# 创建HOG对象并设置SVM检测器
hog = cv2.HOGDescriptor()
hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())
# 读取图像
image = cv2.imread(image_path)
# 检测行人
boxes, weights = hog.detectMultiScale(image, winStride=(2, 2), padding=(8, 8), scale=1.05)
# 绘制检测框
for (x, y, w, h) in boxes:
cv2.rectangle(image, (x, y), (x + w, y + h), (0, 0, 255), 2)
# 显示结果图像
cv2.imshow("Pedestrian Detection", image)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == "__main__":
# 指定要检测的图像路径
image_path = "path_to_your_image.jpg"
detect_pedestrians(image_path)
这个示例加载了一个预训练的HOG+SVM的行人检测器,并用它来检测图像中的行人。
detectMultiScale方法返回的是一个数组,其中包含检测到的对象的边界框的位置和大小。
然后,我们遍历这些边界框,并在原始图像上绘制它们。
需要注意的是,基于HOG特征的行人检测方法可能会受到图像质量、行人姿态和外观等因素的影响,因此在实际应用中可能需要调整参数或考虑使用更复杂的方法来提高检测性能。
在
hog.detectMultiScale(image, winStride=(4, 4), padding=(8, 8), scale=1.05)
这行代码中,各参数含义如下:
- image: 这是要进行行人检测的输入图像。
- winStride: 这是一个元组,表示滑动窗口的步长。例如,winStride=(4, 4)表示在水平和垂直方向上,每次滑动4个像素。增加这个值将会加快检测速度,但可能会降低检测的精度。
- padding: 这也是一个元组,表示在图像边缘添加的填充像素。例如,padding=(8, 8)将在图像的所有边缘添加8个像素的填充。这个参数可以帮助改进边缘区域的检测效果。
- scale: 这是一个浮点数,表示每次检测后图像的缩放比例。scale=1.05表示每次检测后,图像的尺寸将缩小5%。这个参数可以用来在多尺度上检测行人,但也可能增加计算的复杂性。
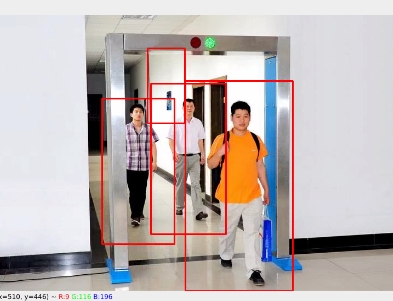
运行结果: