¶ 图像特征提取
¶ 图像特征提取应用
图像特征提取是计算机视觉领域中的一个重要技术,它在各种应用中发挥着关键作用。以下是图像特征提取的一些主要应用:
- 物体识别和分类:通过提取图像中的关键特征,如边缘、角点、纹理等,可以训练机器学习模型来识别和分类不同的物体。这种应用在机器人视觉、自动驾驶等领域中具有重要作用。
- 人脸识别:在人脸识别中,通过提取人脸图像的特征,如眼睛、鼻子、嘴巴的形状和位置,可以实现高效和准确的人脸识别。这种技术在安全监控、身份验证等方面有广泛应用。
- 图像检索:图像特征提取可以用于图像检索系统中,通过提取图像的特征并与数据库中的图像特征进行比较,可以快速找到相似的图像。
- 医学图像处理:在医学领域,图像特征提取可用于辅助诊断疾病。例如,通过提取医学图像中的纹理、形状等特征,可以帮助医生识别病变区域。
- 自然语言处理与计算机视觉的融合应用:图像特征提取可以与自然语言处理技术相结合,实现图像与文本的跨模态检索。这种应用在社交媒体、电商推荐等领域具有很高的实用价值。
- 视频分析:在视频分析中,图像特征提取可用于提取视频帧中的关键信息,如目标物体的运动轨迹、场景变化等,从而实现对视频内容的理解和分析。
需要注意的是,图像特征提取的效果很大程度上取决于所选择的特征提取算法和实际应用场景。因此,在实际应用中,需要根据具体任务选择合适的特征提取方法,并结合其他相关技术,以实现最佳的图像处理和分析效果。
¶ 边缘检测
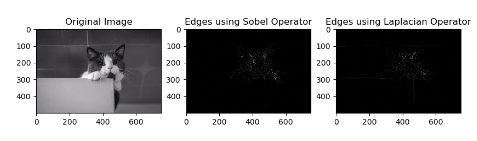
常见的边缘检测方法包括Sobel算子、Laplacian算子等。这些算子都是通过计算图像灰度函数的一阶或二阶导数来检测边缘。
- Sobel算子:Sobel算子是一种离散的微分算子,它结合了高斯平滑和微分求导运算,利用局部差分寻找边缘。该算子能够根据像素点上下左右邻点的灰度加权差,在边缘处达到极值这一现象检测边缘,对噪声具有平滑作用,能提供较为精确的边缘方向信息。由于Sobel算子结合了高斯平滑和微分求导,因此结果会具有更多的抗噪性。
- Laplacian算子:Laplacian算子是一种二阶微分算子,具有各向同性。它对孤立象素的响应要比对边缘或线的响应要更强烈,因此只适用于无噪声图象。存在噪声情况下,使用Laplacian算子检测边缘之前需要先进行低通滤波。Laplacian算子对图像中的边缘有锐化作用,可能使边缘更明显。
总结来说,这两种算子各有特点,Sobel算子能在一定程度上抑制噪声,而Laplacian算子能使边缘更明显,但可能对噪声敏感。在实际应用中,可以根据图像的特点和需求选择合适的算子。
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取图片
img = cv2.imread('cat.jpeg')
# 将图片转换为灰度图
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 使用Sobel算子进行边缘检测
sobel_edges = cv2.Sobel(gray_img, cv2.CV_8U, 1, 1, ksize=3)
# 使用Laplacian算子进行边缘检测
laplacian_edges = cv2.Laplacian(gray_img, cv2.CV_8U)
# 显示原始图像和处理后的图像(可选)
plt.figure(figsize=(10,10))
plt.subplot(1,3,1), plt.imshow(gray_img, cmap='gray'), plt.title('Original Image')
plt.subplot(1,3,2), plt.imshow(sobel_edges, cmap='gray'), plt.title('Edges using Sobel Operator')
plt.subplot(1,3,3), plt.imshow(laplacian_edges, cmap='gray'), plt.title('Edges using Laplacian Operator')
plt.show()
运行结果如下所示:
¶ 角点检测
角点提取的方法包括Harris角点检测算法、Shi-Tomasi角点检测算法等。这些算法通过计算图像中每个像素点的灰度值变化率来判断该点是否为角点。
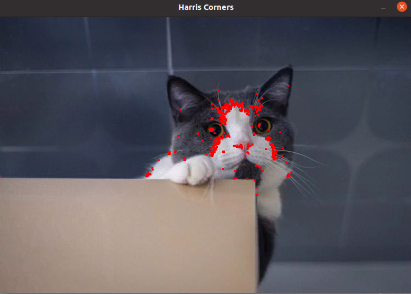
- Harris角点检测算法:Harris算法是一种基于图像局部灰度值变化的角点检测算法。它首先计算图像在x和y方向的梯度Ix和Iy,然后计算每个像素点的梯度平方和梯度在该点的和。之后,它会在每个像素点定义一个矩阵H,这个矩阵其实就是前面计算得到的M。然后,通过计算每个像素的角点响应,设置阈值找出可能点并进行非极大值抑制,从而得到角点。
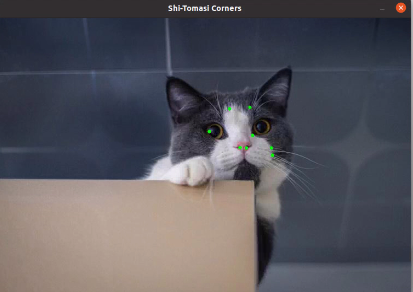
- Shi-Tomasi角点检测算法:Shi-Tomasi算法与Harris算法在很多方面都很相似,主要的区别在于打分函数的定义。Shi-Tomasi使用的打分函数为R = min(λ1, λ2),如果打分超过阈值,就认为它是一个角点。
这两种算法都有其独特的优点,选择哪种算法取决于具体的应用和需求。
需要注意的是,这些算法通常对大尺度变化、噪声等具有一定的鲁棒性,但在实际应用中,可能还需要结合其他图像处理技术以提高检测的准确性。
下面是Harris角点检测:
import cv2
import numpy as np
# 读取图片
img = cv2.imread('cat.jpeg')
# 将图片转换为灰度图
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Harris角点检测
corner_harris = cv2.cornerHarris(gray_img, 2, 3, 0.04)
# 对Harris检测的结果进行膨胀,以便更好地标记角点位置
corner_harris = cv2.dilate(corner_harris, None)
# 阈值处理,将角点和非角点分开(可调整阈值进行更细致地控制)
corner_harris[corner_harris > 0.01 * corner_harris.max()] = 255
corner_harris = np.uint8(corner_harris)
# 找到Harris角点,并标记出来
img[corner_harris > 0] = [0, 0, 255]
# 显示图像
cv2.imshow('Harris Corners', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果如下图所示:
下面是Shi-Tomasi角点检测:
import cv2
import numpy as np
# 读取图片
img = cv2.imread('cat.jpeg')
# 将图片转换为灰度图
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Shi-Tomasi角点检测,这里使用cv2.goodFeaturesToTrack函数
corners = cv2.goodFeaturesToTrack(gray_img, maxCorners=100, qualityLevel=0.3, minDistance=7)
# 在原图像上绘制检测到的角点
for corner in corners:
x, y = corner.ravel()
cv2.circle(img, (x, y), 3, (0, 255, 0), -1)
# 显示图像
cv2.imshow('Shi-Tomasi Corners', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果如下:
¶ 轮廓提取
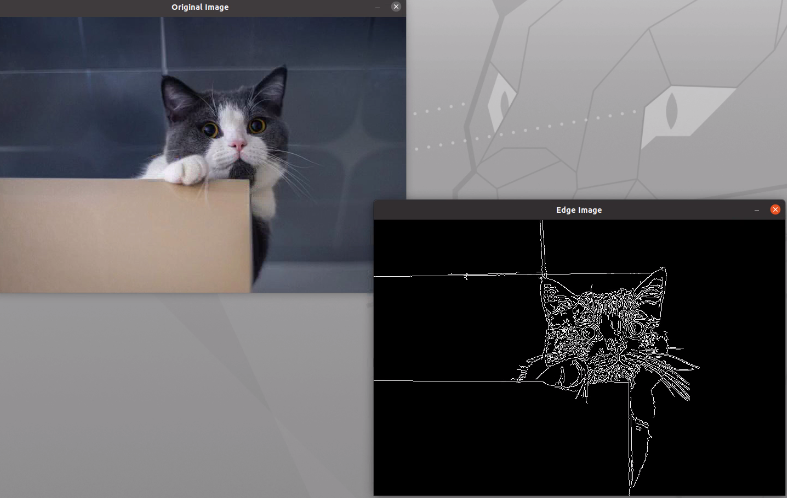
Canny算法是一种多级边缘检测算法,由John F. Canny于1986年开发。以下是Canny算法的详细介绍:
Canny算法的目标是找到一个最优的边缘检测算法,其最优边缘的定义为:好的检测(算法能够尽可能标记出图像中的实际边缘)、好的定位(标识出的边缘要与实际图像中的边缘尽可能接近)以及最小响应(图像中的边缘只能标记一次)。
Canny算法的步骤包括:
- 图像滤波降噪:使用高斯滤波平滑图像,减少图像噪声。这是边缘检测算法的必备第一步。
- 像素梯度计算:根据图像灰度值函数的导函数取最大值的区域对应图像的边缘的原理,Canny算法通过Sobel算子分别检测图像X方向和Y方向的边缘,然后记录梯度的方向。
此外,Canny算法还使用非极大值抑制技术,其思想是搜索局部最大值,抑制非极大值。这一步的目的是剔除掉一大部分非边缘的点。
最后,双阈值算法被用于检测和连接边缘。
需要注意的是,Canny算法中的高斯卷积核大小的选择将影响检测器的性能。尺寸越大,检测器对噪声的敏感度越低,但是边缘检测的定位误差也将略有增加。
因此,在实际应用中需要权衡这两个因素。
import cv2
# 读取图片
img = cv2.imread('cat.jpeg')
# 将图片转换为灰度图
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 使用Canny算法进行边缘检测
edges = cv2.Canny(gray_img, threshold1=30, threshold2=100)
# 显示原图和处理后的图像
cv2.imshow('Original Image', img)
cv2.imshow('Edge Image', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
我们首先读取图像并转换为灰度图像。
然后,我们使用cv2.Canny()函数来实现Canny边缘检测。
其中,threshold1和threshold2是两个阈值参数,可根据实际情况进行调整。
这两个阈值用于Canny算法中的滞后阈值处理,即只有像素梯度值超过threshold2的点会被认为是强边缘点,而处于threshold1和threshold2之间的点只有与强边缘点相连时才会被认为是边缘点。
最后,我们使用cv2.imshow()函数来显示原始图像和处理后的边缘图像。